联系我们

 /
EN
/
EN
 跨时代具身智能
跨时代具身智能
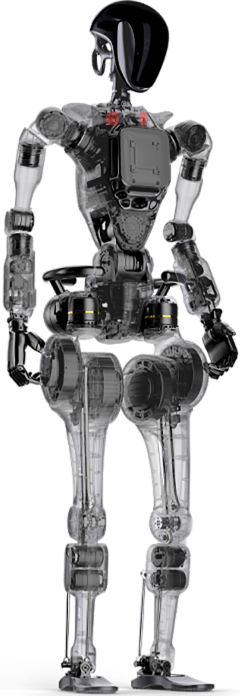
傅利叶通用人形机器人GR-1是自主研发,可以商业化量产的人形机器人。GR-1拥有高度仿生的躯干构型和拟人化的运动控制,覆盖人体的主要自由度,最大关节峰值扭矩达230N.m,具备快速行走,敏捷避障,稳健下坡,抗冲击干扰等运动功能,是通用人工智能的理想载体。
.png)
.png)
.png)

.png)

覆盖人体的主要自由度,可模拟人类不同运动方式,实现转头、扭腰、抓取、跑步、跳跃等拟人化运动。




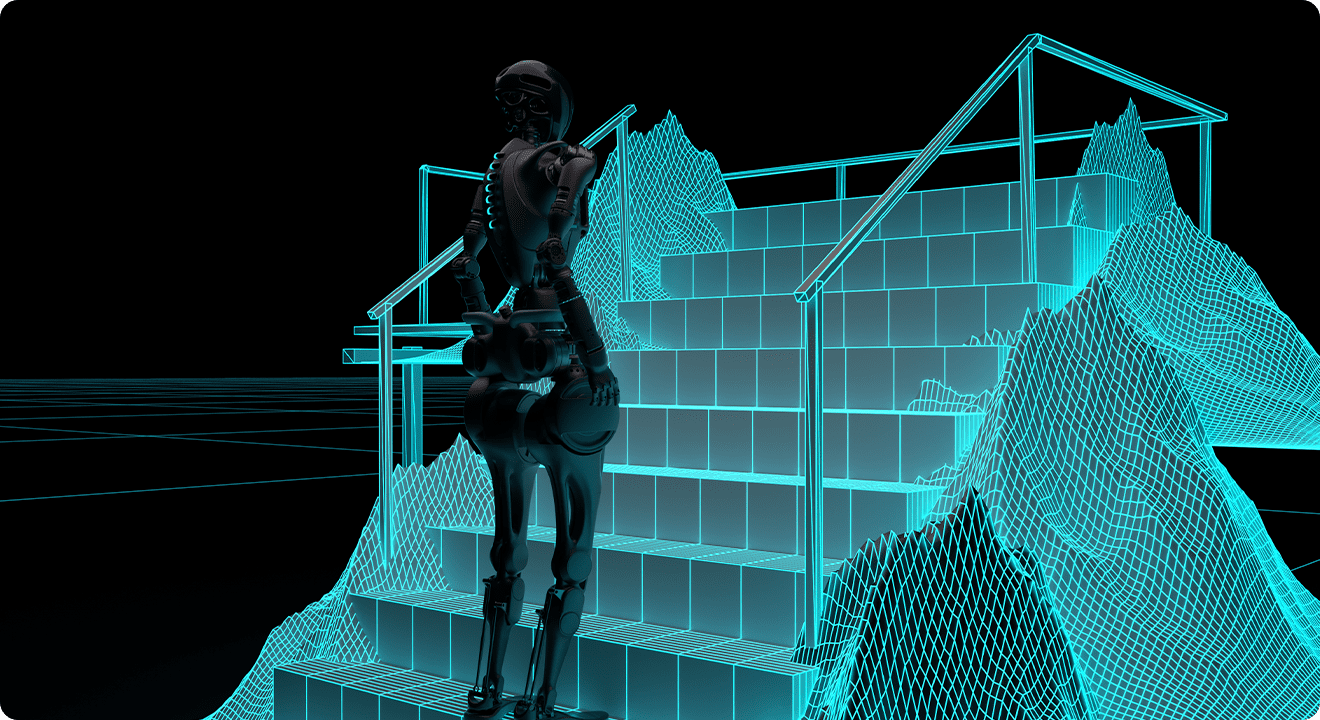
在不稳定、无辅助、强干扰环境下,创新动态协调自平衡算法,机器人始终保持动态平衡,适用更多应用场景。
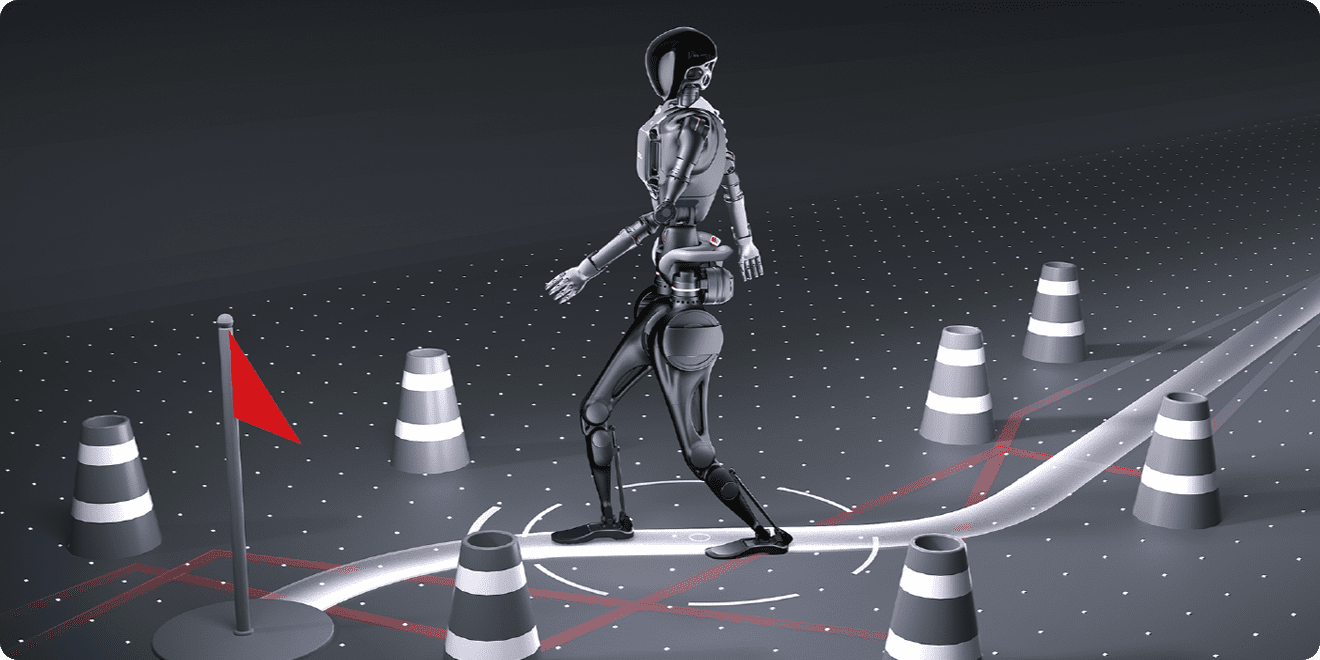

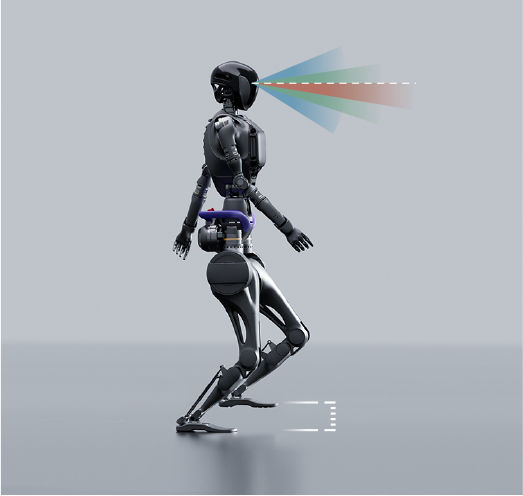
搭载Realsense深度摄像头,可实现视觉感知,自主避障
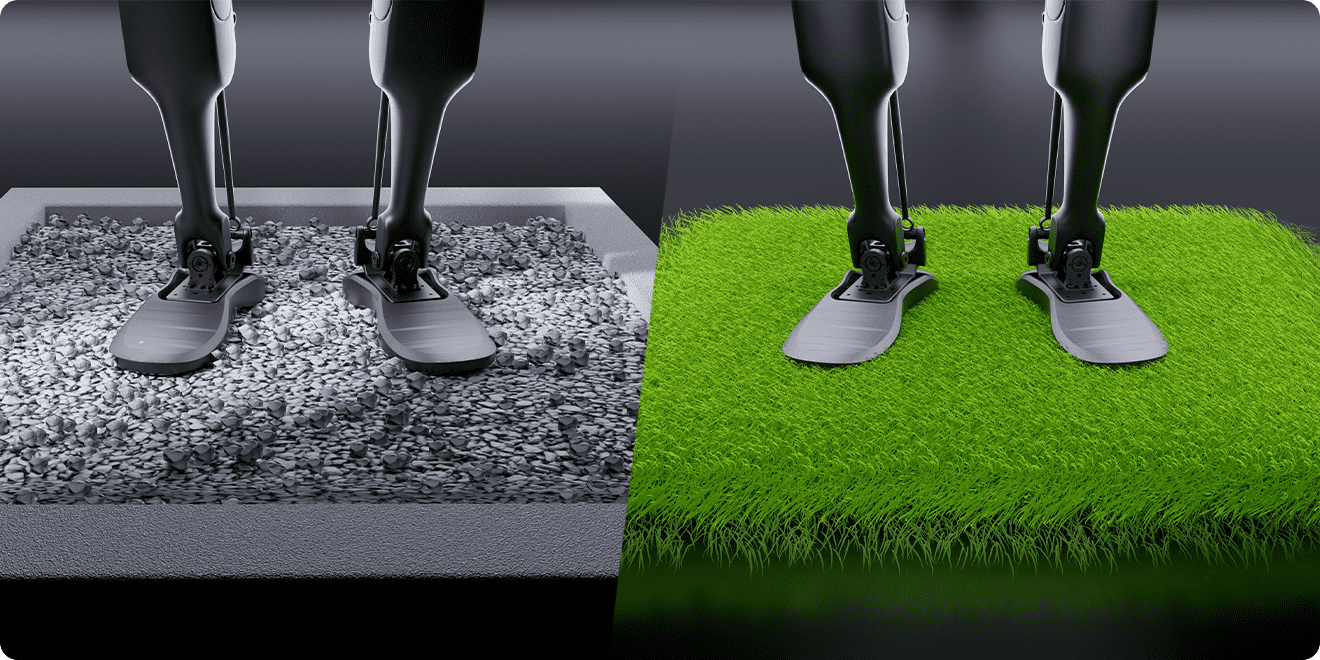
能在碎石地、草地等非平整路面上稳定行走
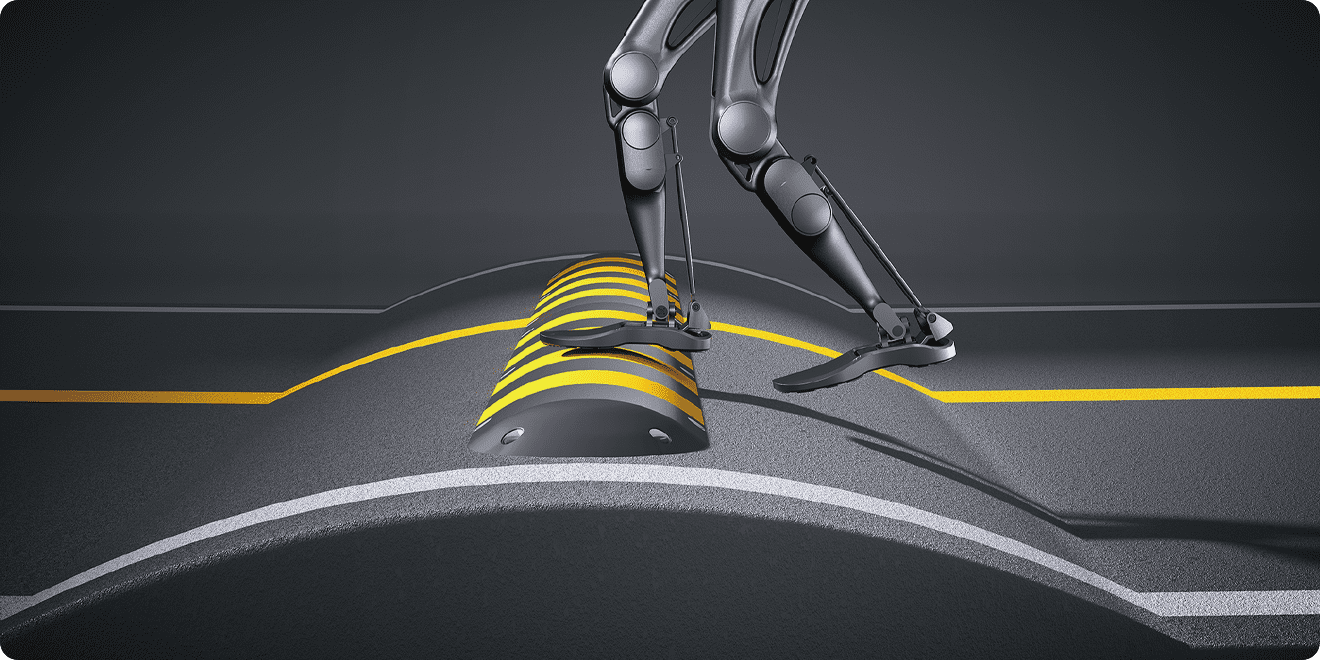
自适应斜坡算法,可直腿通过斜坡路面
行走时外力干扰,机器人可实现稳定平衡不跌倒
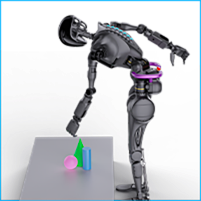
静态站立、步态运动、原地运动、末端抓取四种运动模式下预设扭腰、下蹲、抓握等丰富动作库。




足踝双自由度设计,创新运动控制算法,模拟人类直腿行走自然步态,机器人行走时视野更高,能量消耗更低。

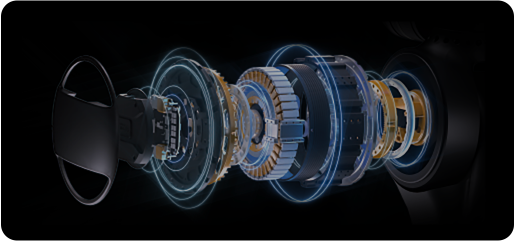
内置32个全自研FSA高性能一体化执行器(集成电机、驱动器、减速器及编码器),最大峰值扭矩达230N.m,
高动态响应能力,实现高难动作力度和精度的精准控制。

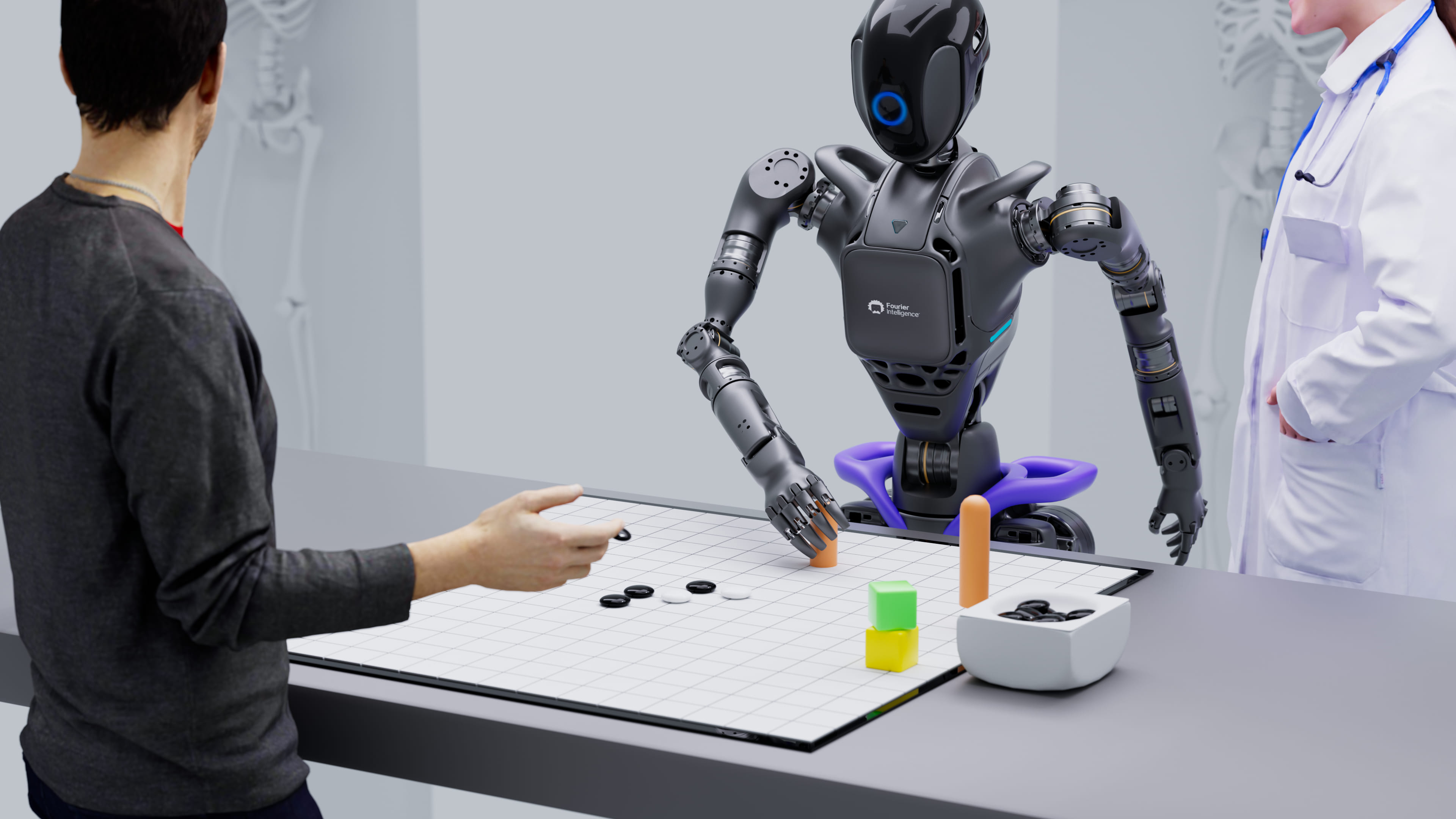
搭载GPT多模态大语言模型(高级语义知识、自然语言理解、指令推理),实现机器人任务自动编排;
内置机器人情感化系统和高清曲面显示,人机互动更自然。









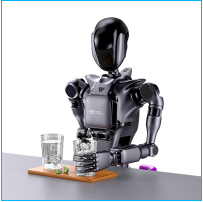
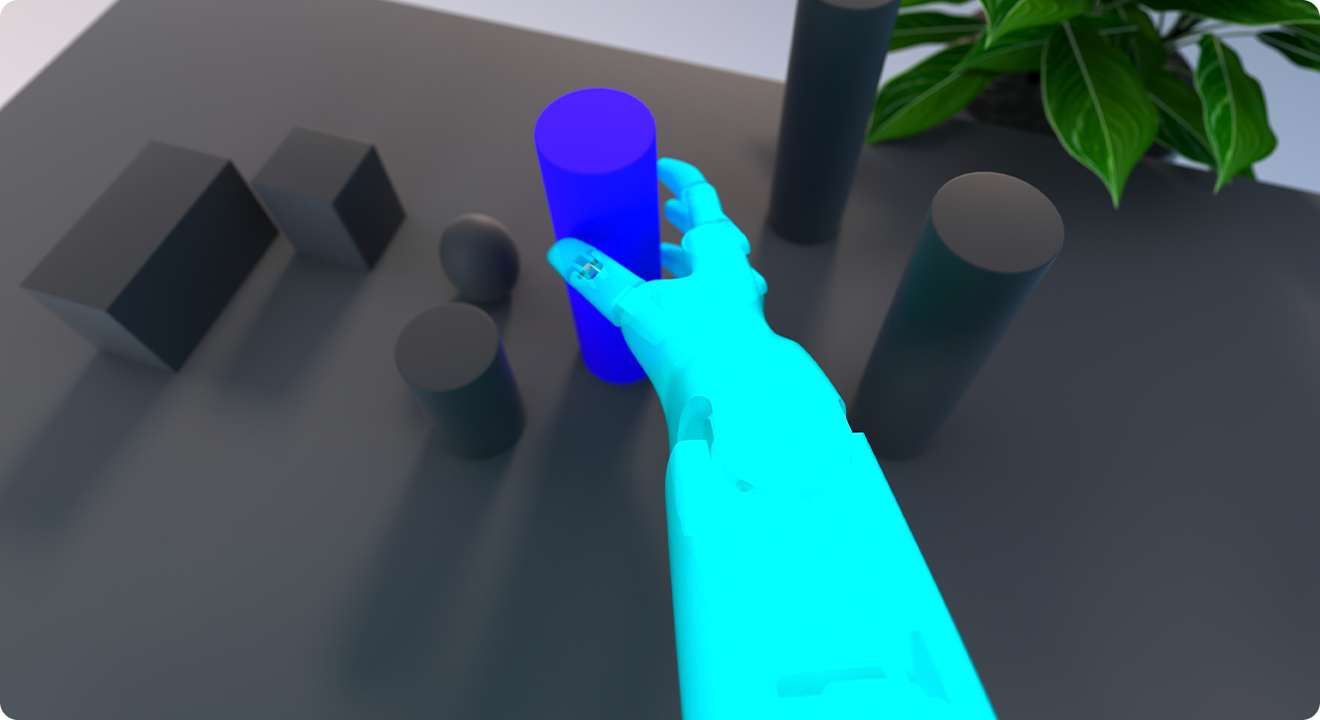
深度视觉相机结合AI视觉算法,可快速识别不同物体,赋予全方位环境感知能力,避障抓取全都会。
支持APP源代码,底层功能SDK和基础预训练大模型开放,与全球开发者共同探索人工智能和机器人的创新组合。
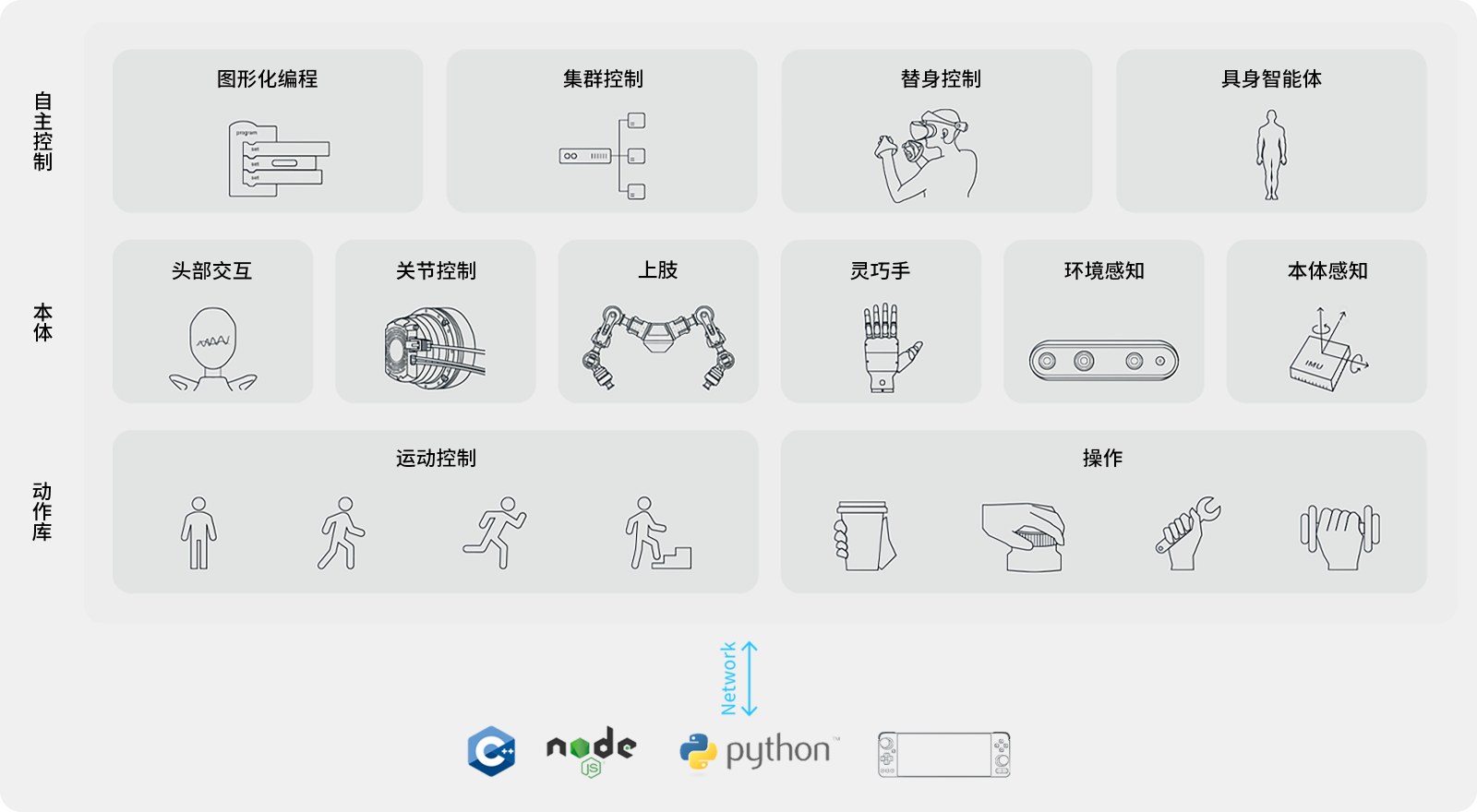
支持手机触屏、遥控一体机、平板、电脑多平台操控,轻松实现模式切换,动作控制,高清图传等,快捷上手,享受智能操控乐趣。

傅利叶GR-1通用人形机器人凭借其卓越的运动能力与可商业大规模量产的产品架构,
在接待引导、安防巡检、工业制造、医疗康复、科研教育、家庭服务等场景都具有较大的应用潜力。