【技术前哨】双足轮腿机器人:不惧崎岖,轻松驾驭
苏黎世联邦理工学院设计出一款兼具轮式和腿式机器人优点的新型机器人——双足轮腿机器人,能适应不同路况,且在速度和便捷性上表现出色。




传统轮椅只能在平坦的路面移动,而能适应不同路况的腿式机器人在速度和便捷性上略显逊色。苏黎世联邦理工学院的九名学生对这一问题进行了探究,设计出一款兼具轮式和腿式机器人优点的新型机器人——双足轮腿机器人。
从外观来看,这款机器人像是两条腿踩着 “风火轮”,它的工作状态也确实如此。

这款机器人有两条仿生机械腿,每条腿配备一个电动轮,腿的弯曲部位有一组弹簧,可以支撑整个机器人。当遇到障碍物时,它会减速,并“蹲下”使弹簧加载,然后通过做出向前向上跳跃的动作,跳过障碍物。拥有这一技能,该机器人甚至可以轻松地爬楼梯。
此外,由于其双腿能够相互独立弯曲,在穿越崎岖地形时,机器人仍能保持平衡。这一特点还使它在受到撞击时依然保持站立状态。
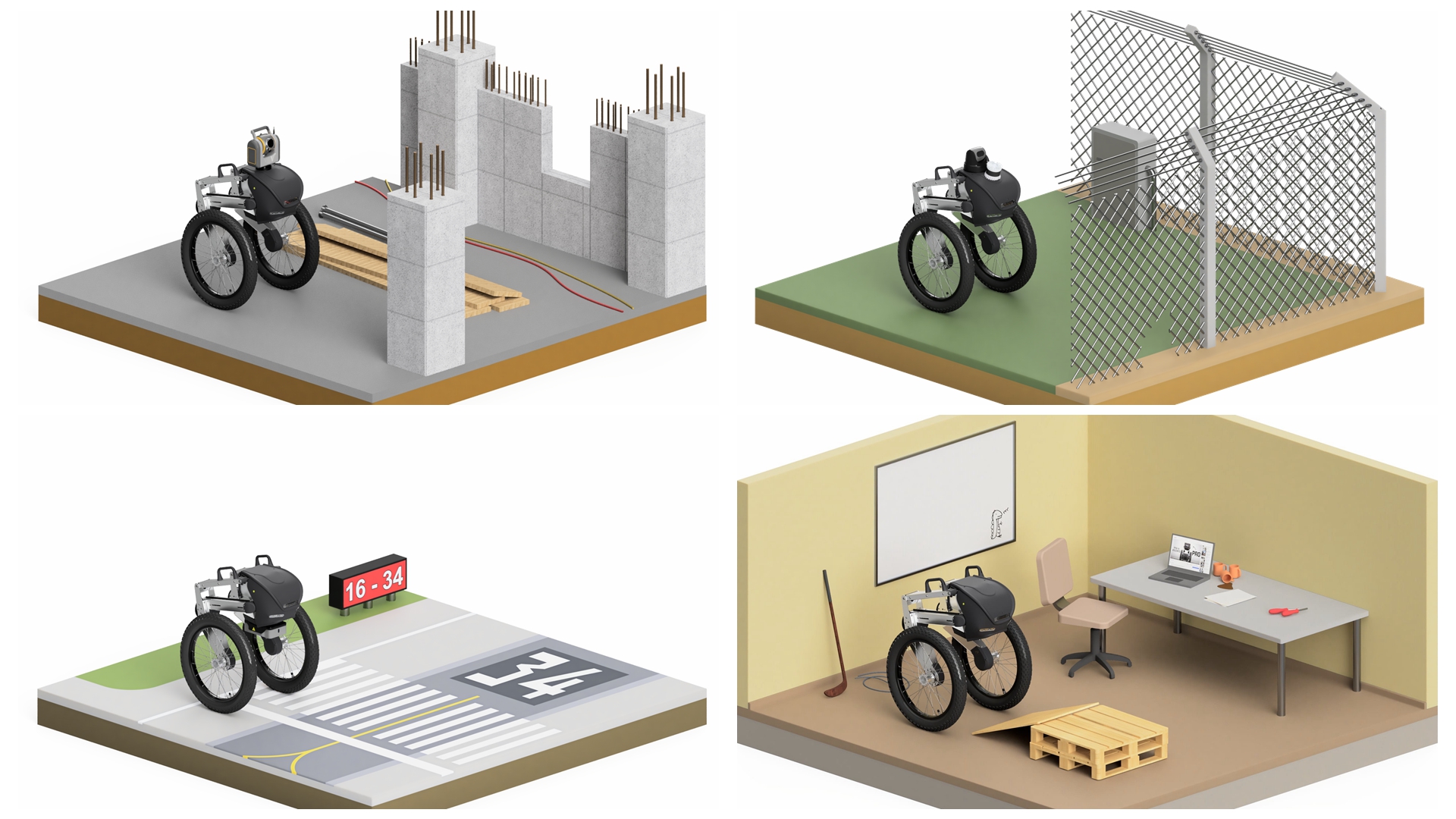
搭载摄像头、距离传感器、景深传感器等元件,该机器人具备极高的自主性,可以对环境进行数据采集和建模,实现自主导航,也可实现全自主充电。其最大速度达12公里/小时,最大载重10公斤,单次充电可使用8小时。
该机器人采用简单、紧凑和模块化的设计,这种设计方式为自定义传感器和多种有效载荷留出了足够的空间,用户可以为其配备额外的传感器和载荷。
该机器人目前主要应用于以下几个领域:通过3D激光扫描仪对设施和工作场所进行数字建模;按照设定进行定期定点巡逻,远程检查现场;搭载探地雷达(GPR)探测基础设施(桥梁、高速公路和机场等)的结构完整性等。
这款机器人的模块化和多功能性,使它能够完成各种各样的任务,这个设计思路未来或许可用于轮椅的设计研发,提高轮椅使用者的生活便利性。
了解更多:https://www.ascento.ch/
关于大赛
第五届“傅利叶”杯中国康复人创意大赛已圆满落幕,相信康复人们不会停止创意革新的脚步,共同期待2022年大赛!公众号将继续推送前沿康复学习材料,敬请关注。


